3D Printing
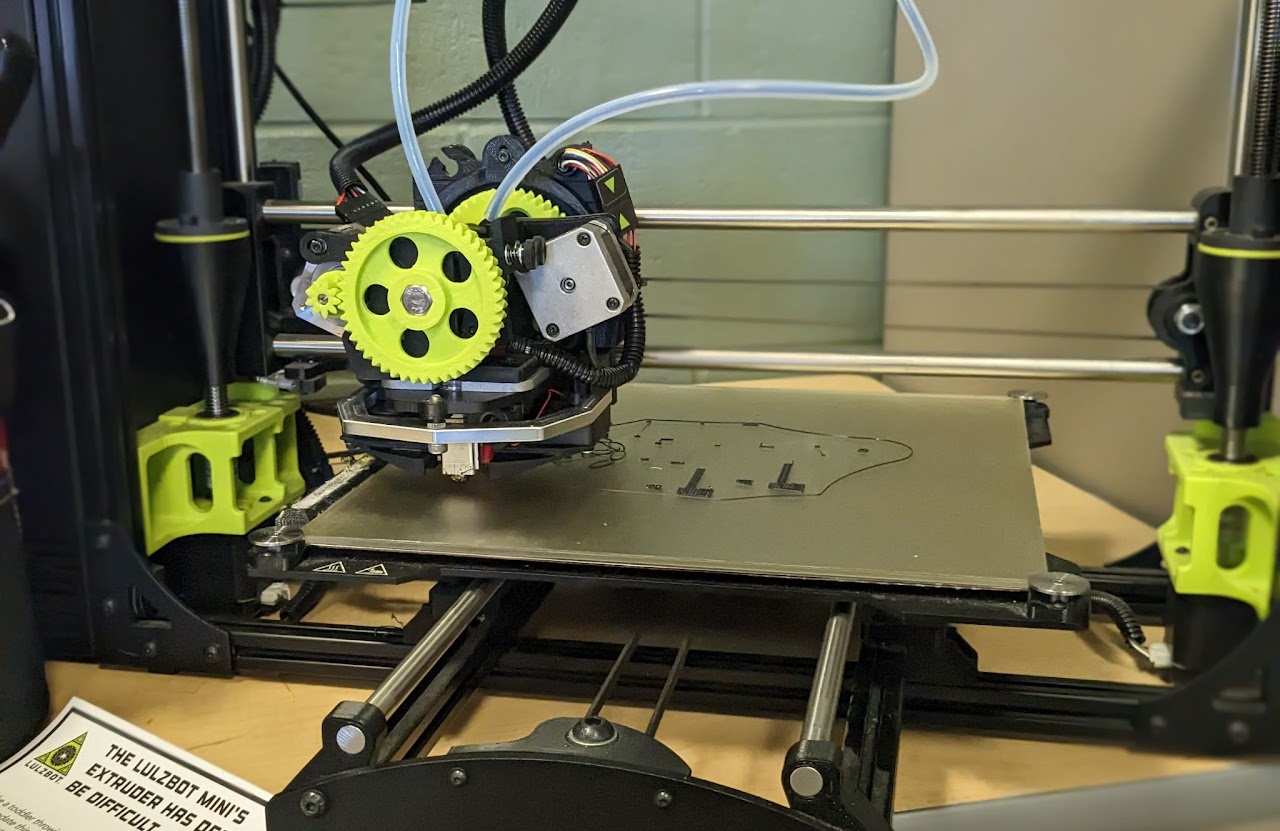
In middle school, I began using my library's Lulzbot Taz 6 to fabricate my projects and designs.

3D Printing
In 2022, as I became more serious about engineering, I purchased an Ender 3 with saved-up money and heavily modified it to meet the specs I wanted.
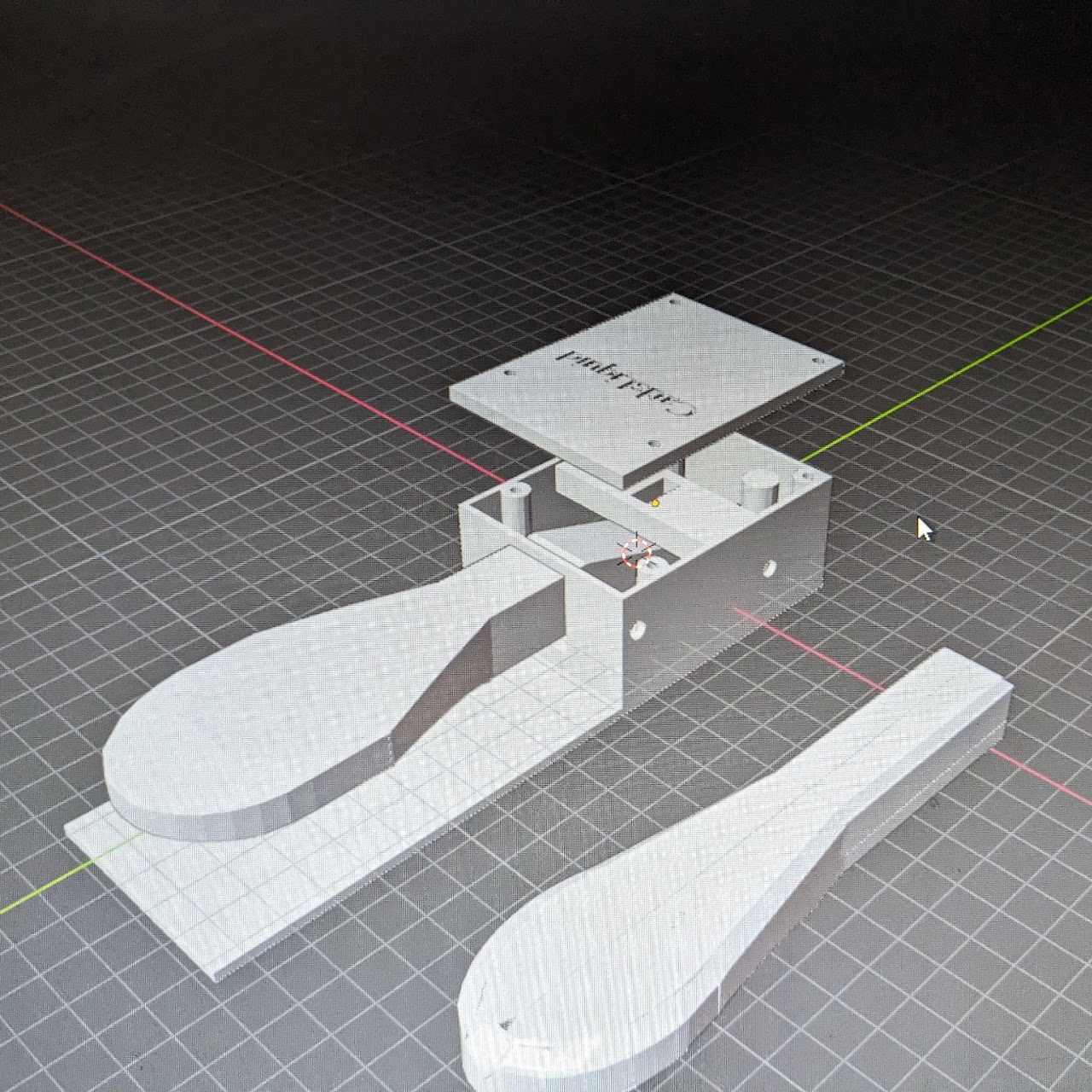

Piano Pedal Replacement
When my e-piano sustain pedal broke, I was able to fix it by CADing a new pedal in Blender and 3D printing before wiring it to the same plug that I spliced from the old pedal.

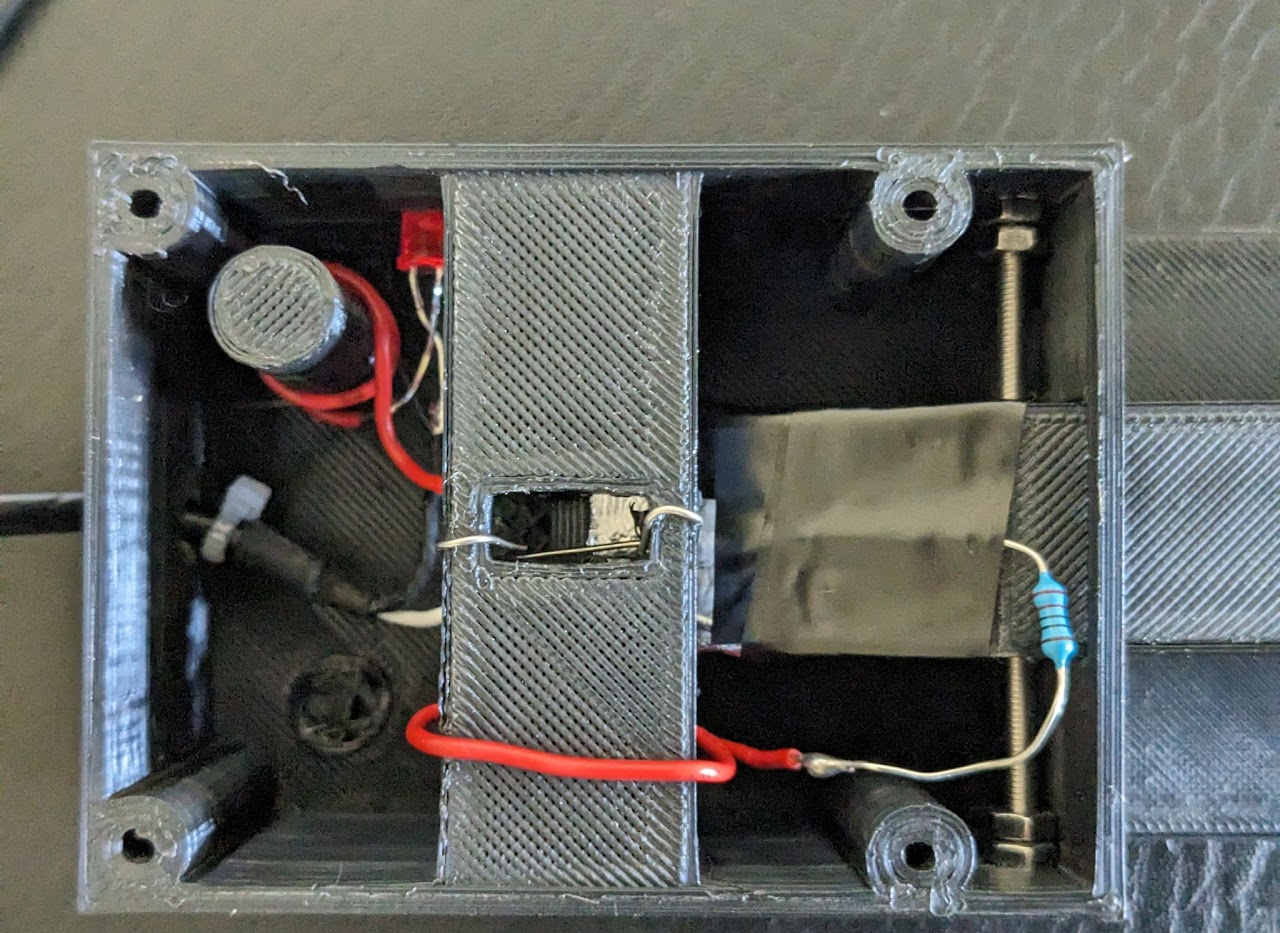
Airsoft Stock
In order to house custom electronics and create a more ergonomic handling during use, OnShape was used to design a multi-material stock based on the Hera CQR.
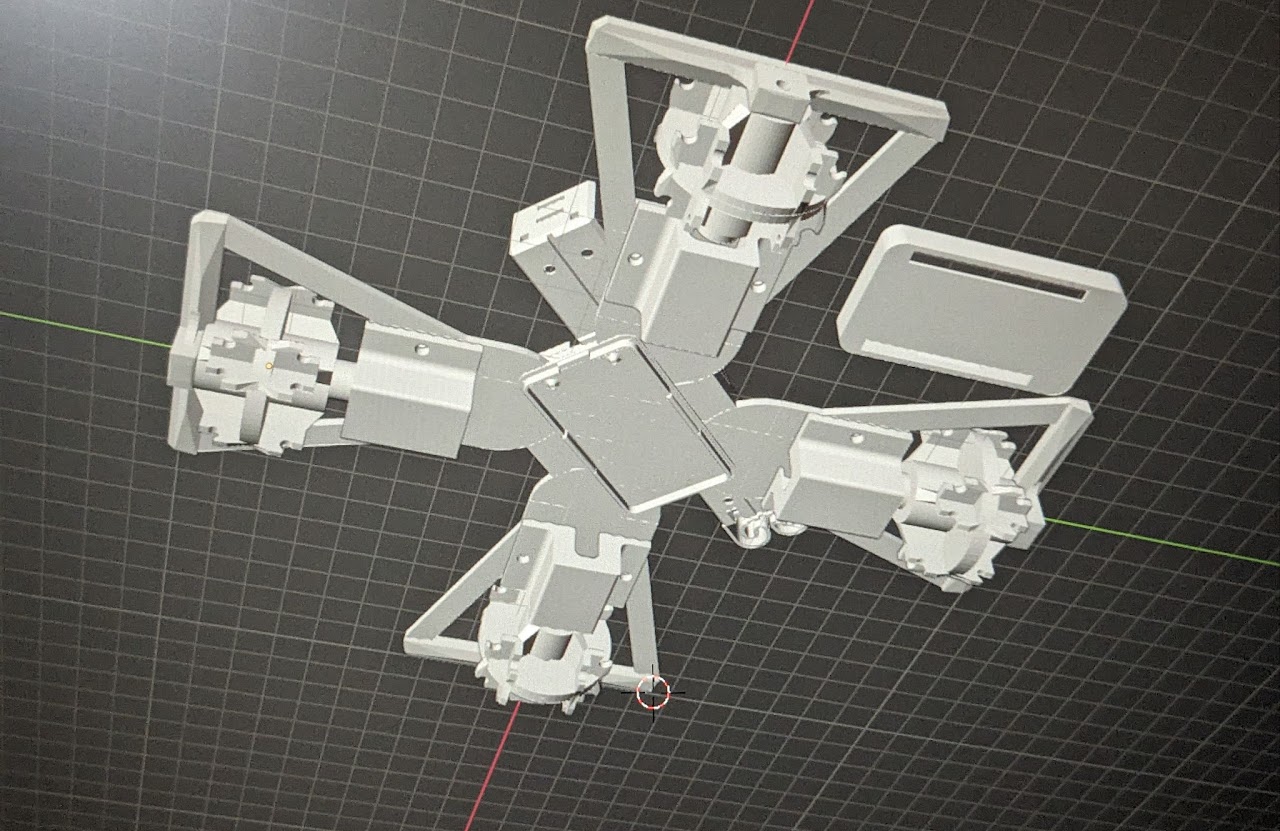
X-Drive Robot
Fascinated with omnidirectional mobility, I CADed an x-drive frame that fit on my printer bed and could hold the needed batteries, controllers, and electronics.

6 DOF Arm
For part of my AP Research project from 2025-2026, a 6 DOF robotic arm was designed to use MG996R servo motors and #8-32 hardware.

Sash Clamps
Using PLA clamps designed in Fusion360 and assembled with threaded rod, I created sash clamps to hold glued wood while it dried.
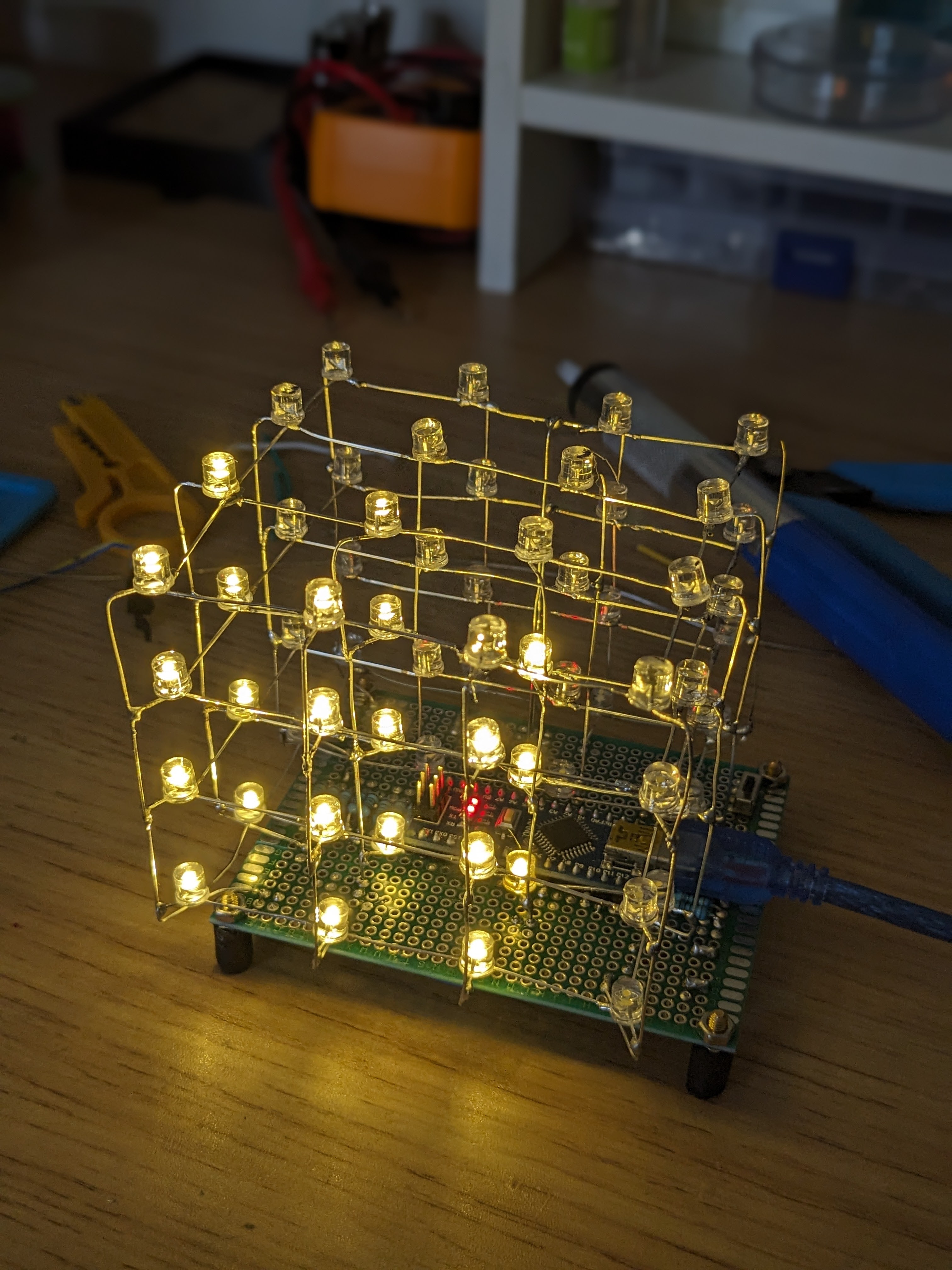
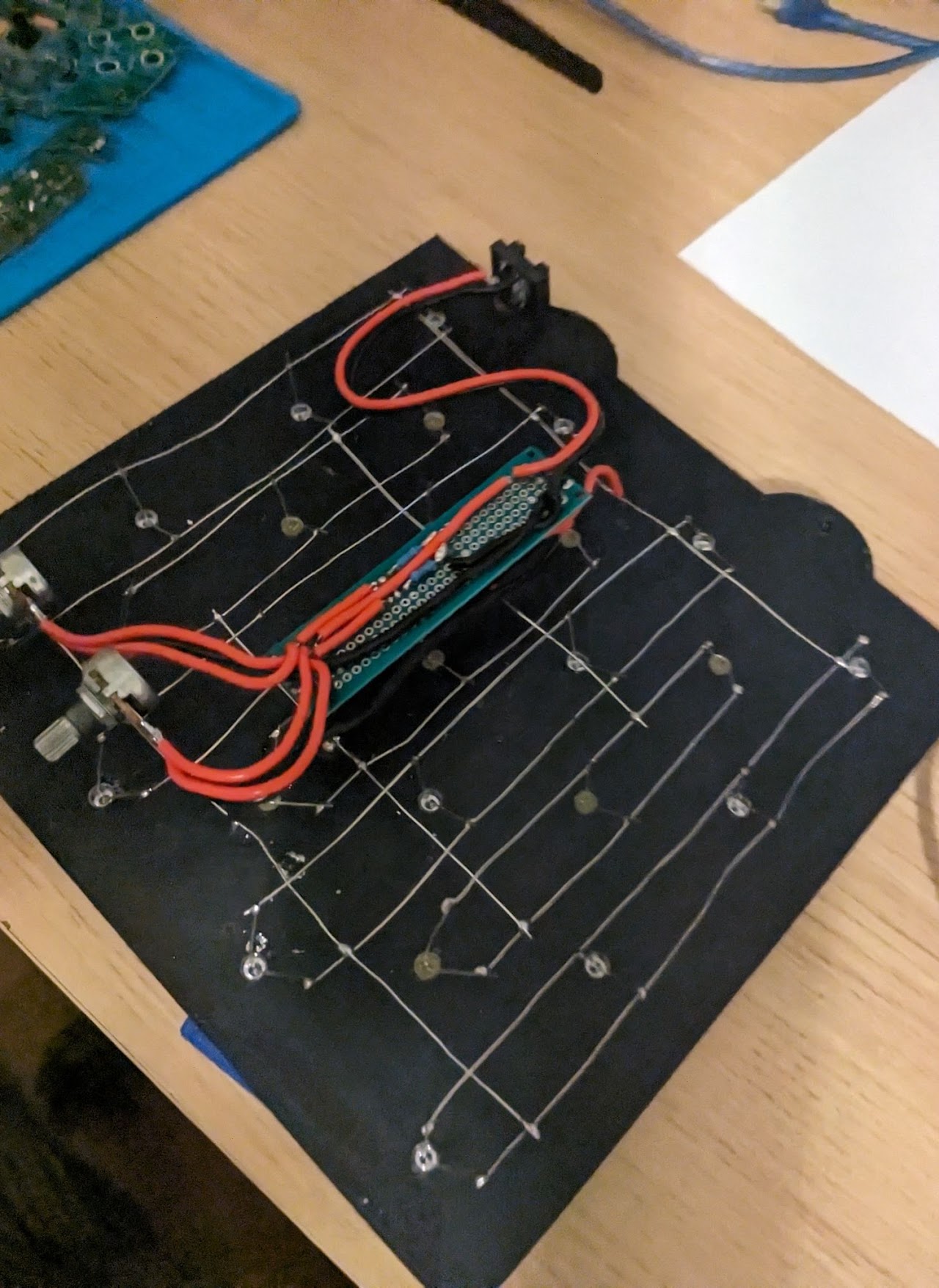
LED Matrix
4x4 LED matrix running on Arduino NANO

FRC Climber
For the 2025-2026 Rebuilt FRC game, I designed a cascading climber to be operated by Falcon motors with a gear reductino pulley and one-way latches to create a climbing mechanism capable of reaching the top bar of the ladder.

QR Code Keychain
Using a QR code generator, converting a png to an STL, and extruding, I was able to project the surface of a QR code onto a keychain in Blender.
Desk Lamp
As my freshman year of high school started, I found myself studying a lot more and at many hours of the day. I wanted to create a lamp with adjustable brightness to ease the strain on my eyes during restless nights.


Epoxy Molded Lights
While working on a rover project, I used Onshape to model headlights and a subtractive modeling tools to create a 3dprintable mold that I could pour epoxy in and peel off, revealing a headlight with room to put LEDs.
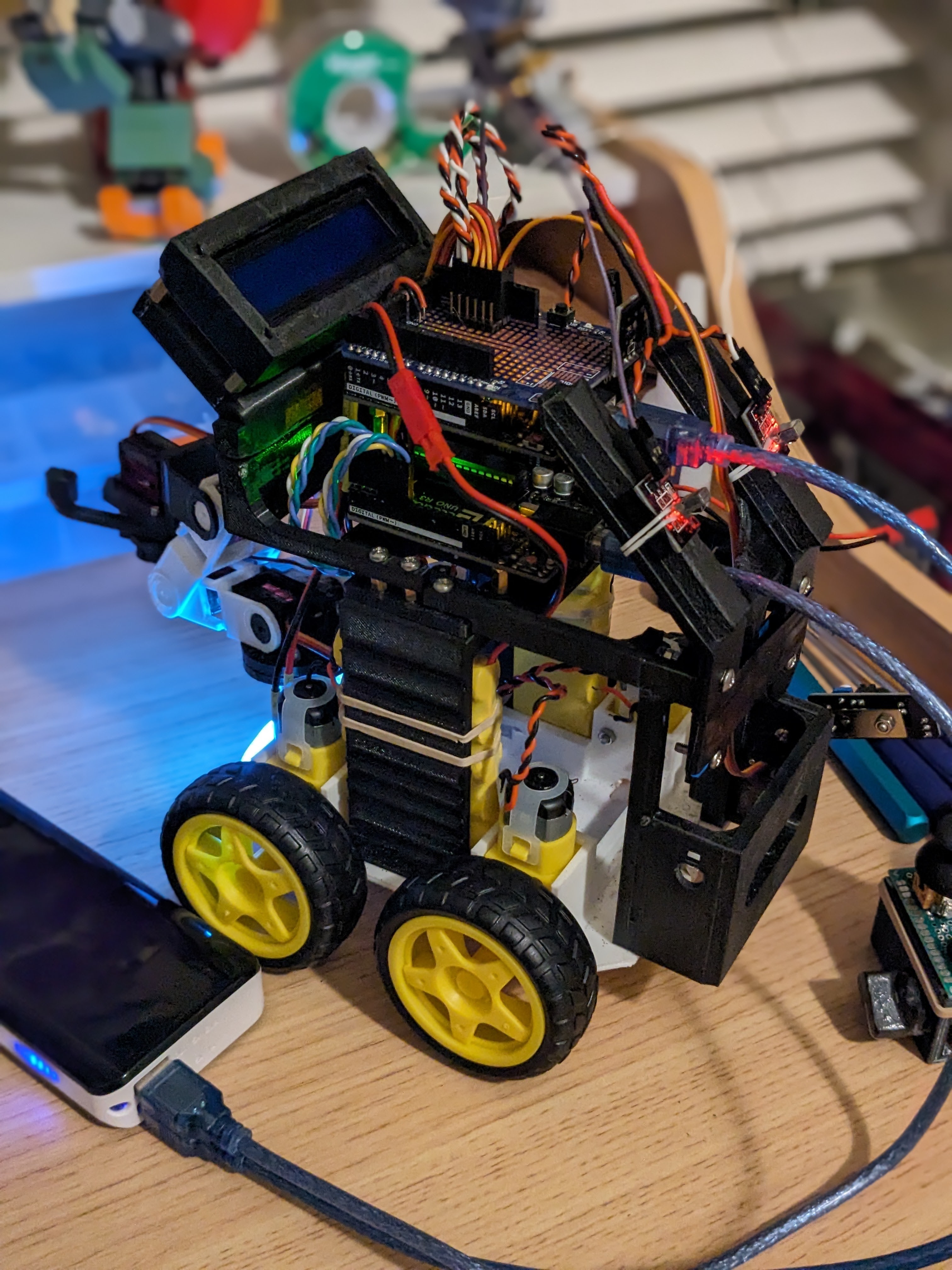
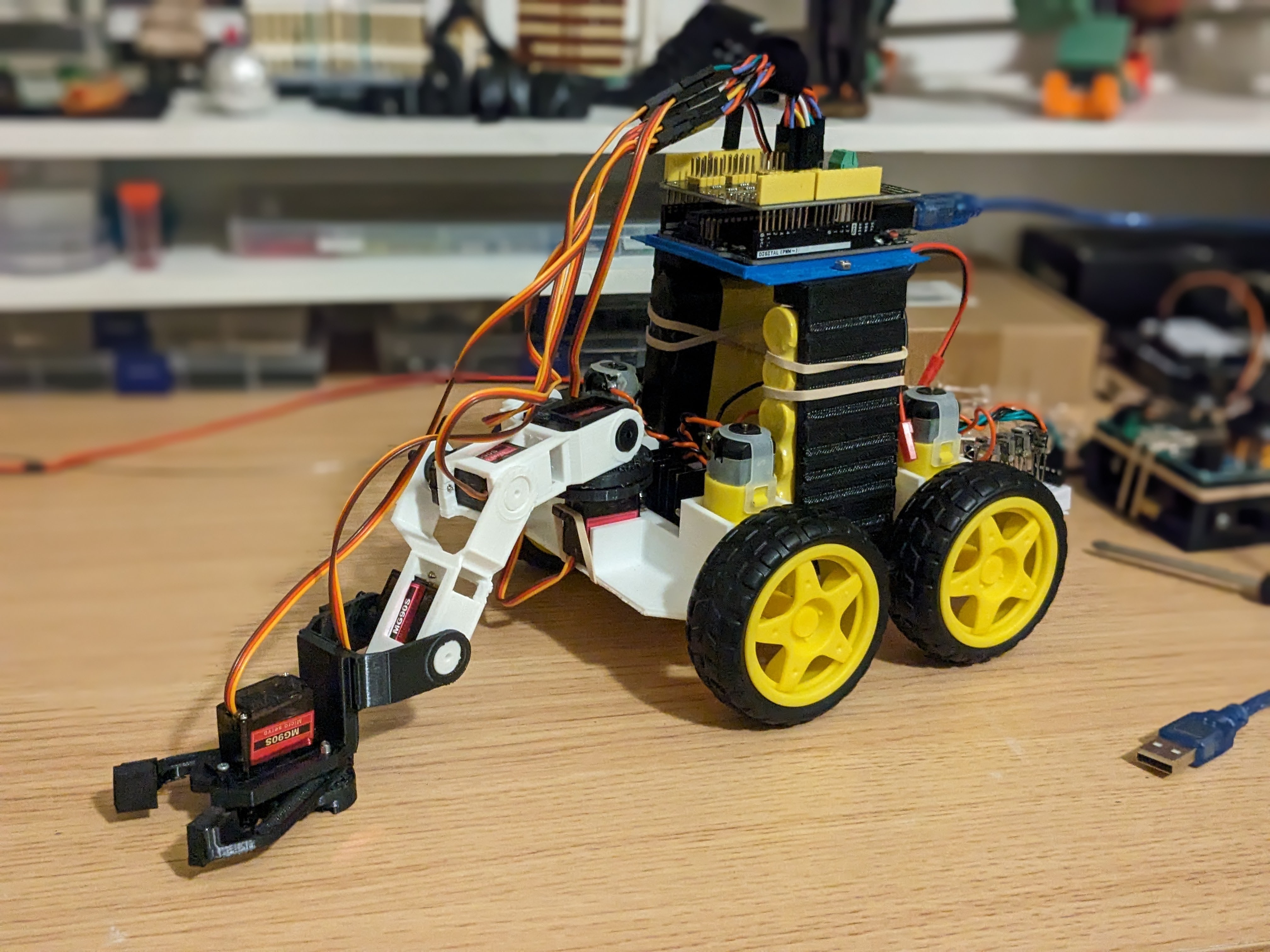
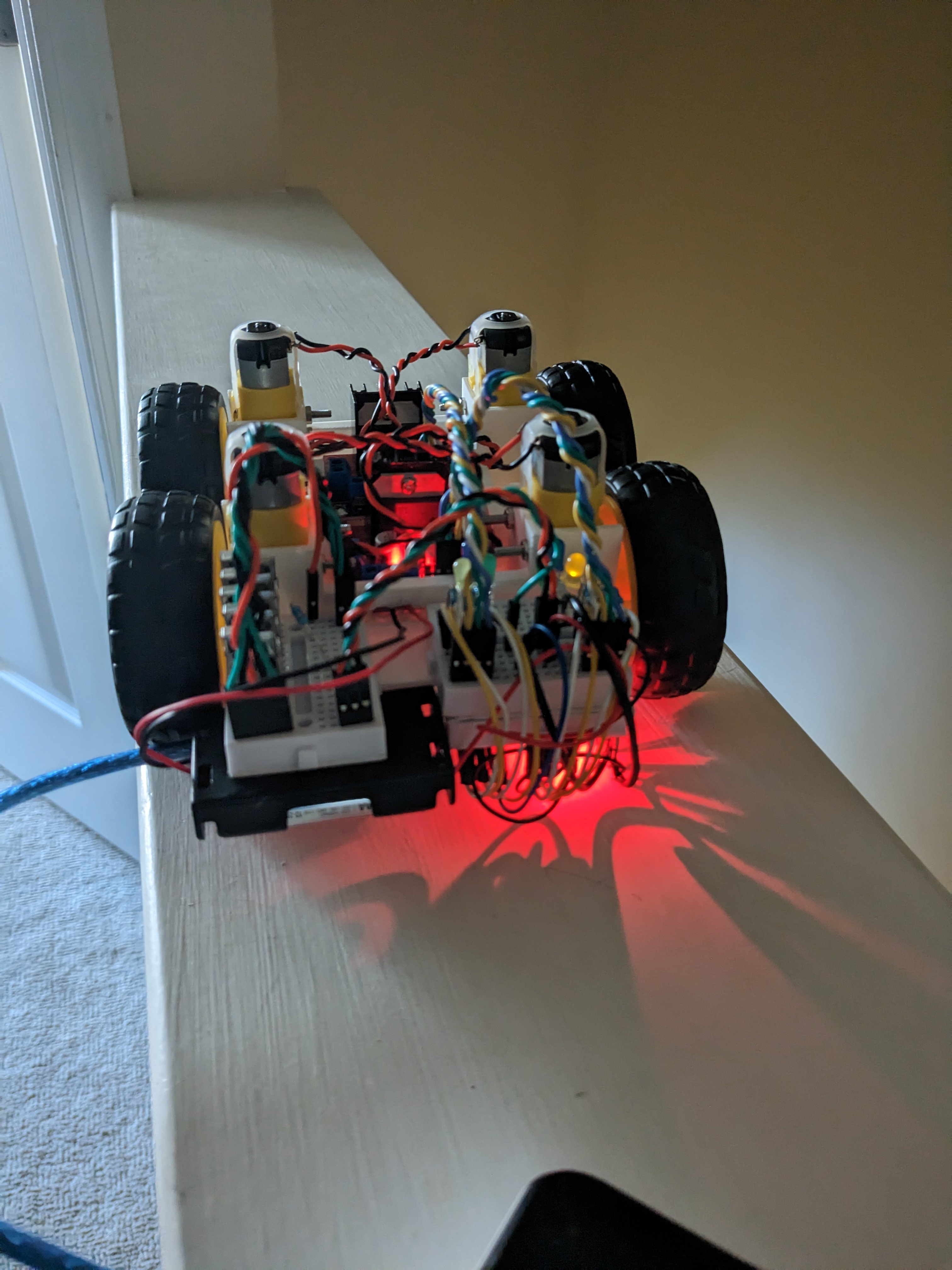
Autonomous Rover
Relying on sensor data, I designed, coded, and assembled a rover capable of manuevering around obstacles, manipulating elements, and reacting based off of stimuli. Using an iterative design process, my project quickly scaled as my first major project and was achieved through the engineering process.
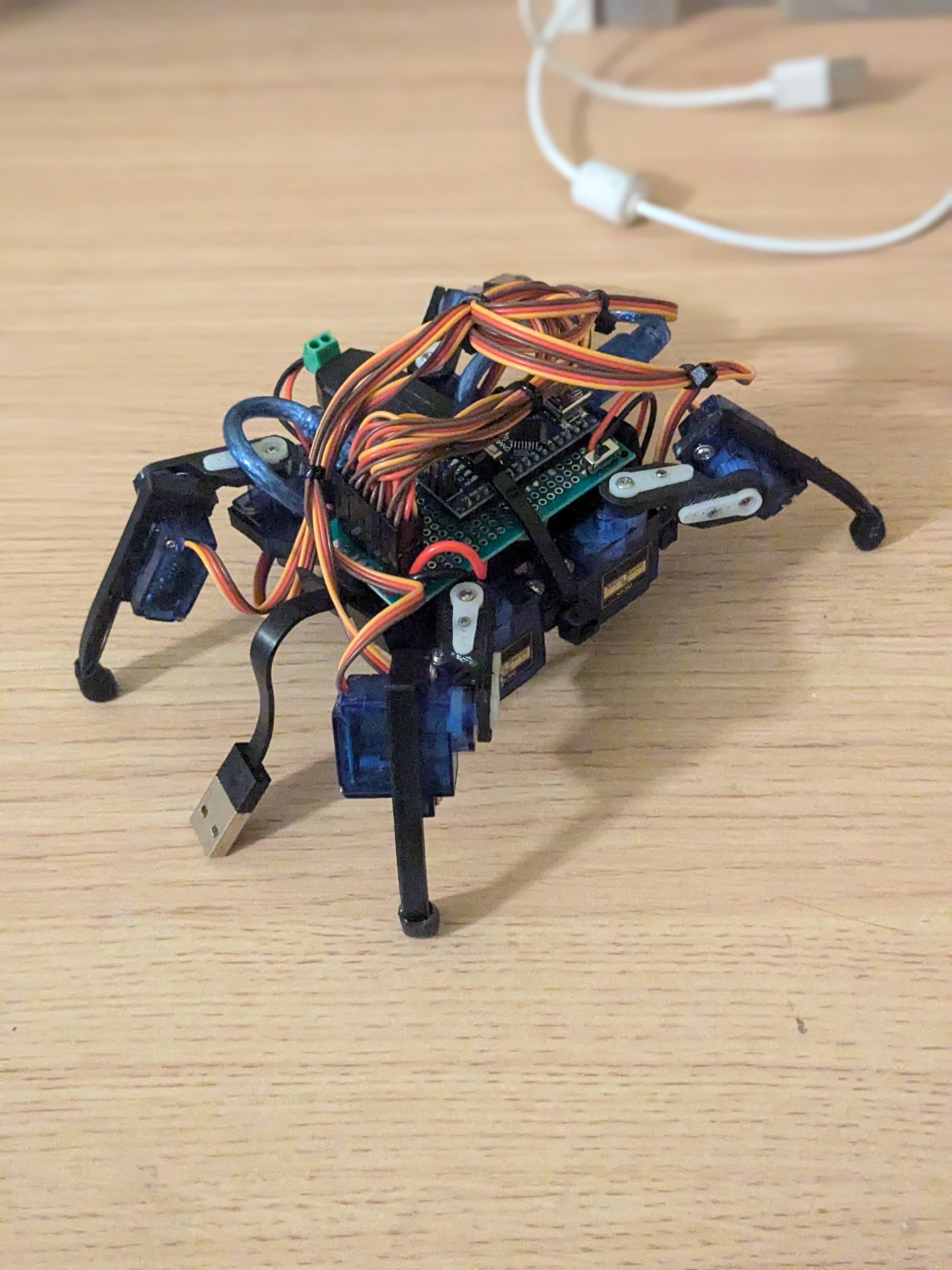
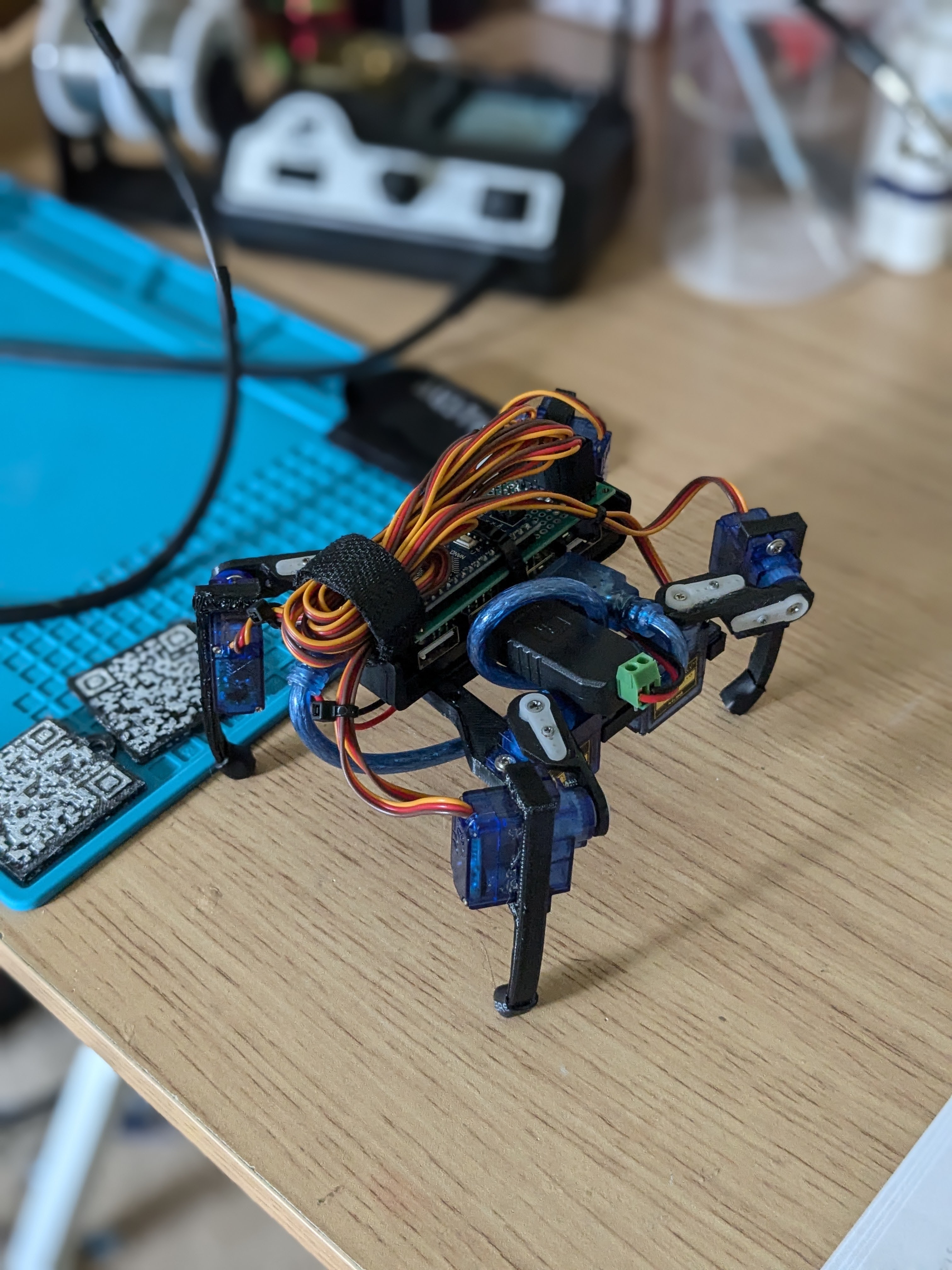
Quadraped Robot
Using my Ender 3, I assmbled a quadruped robot using SG90 servo motors and soldering a custom circuit and power source.
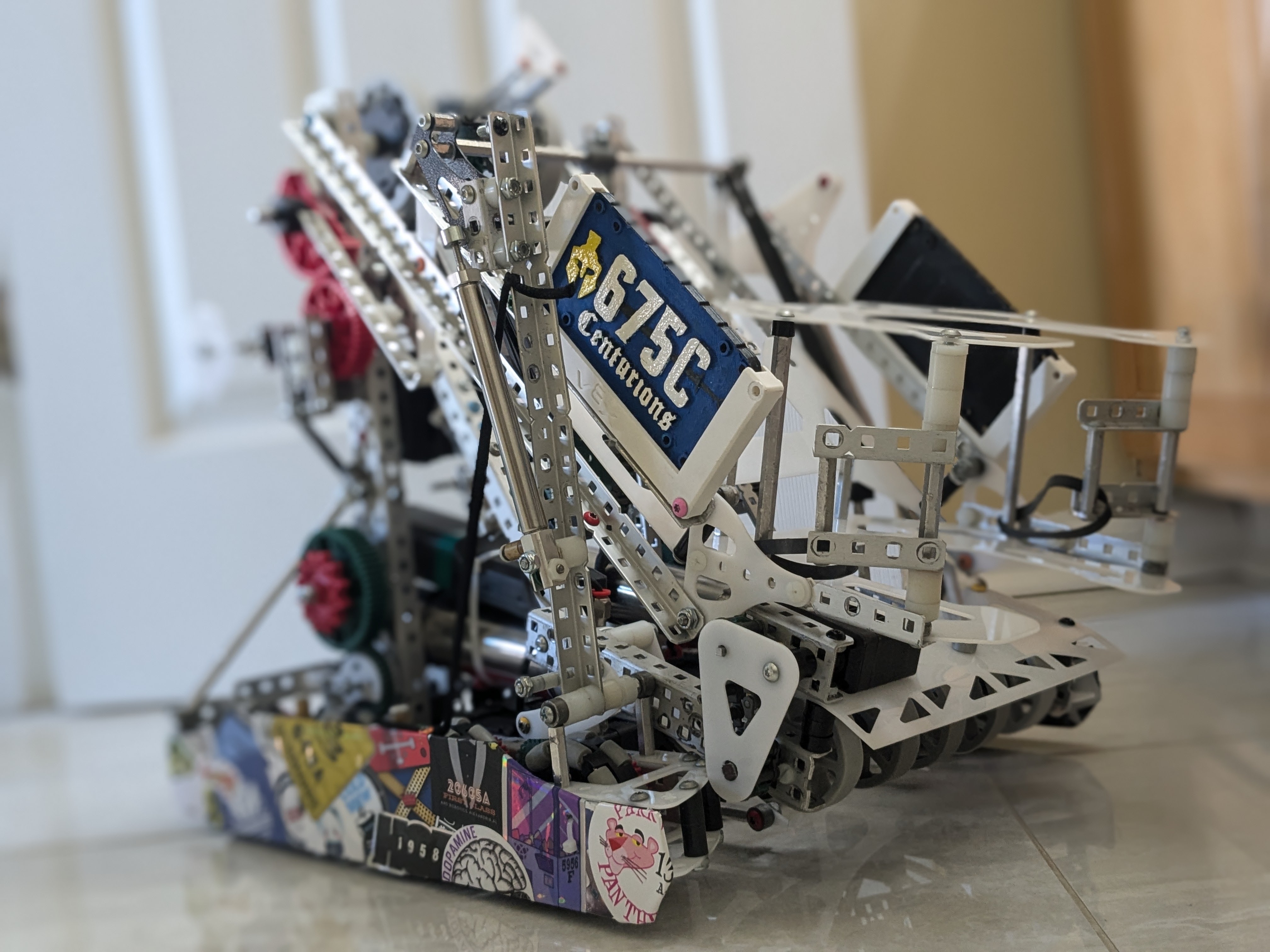

Spectre
Mid-Season V5RC Robot


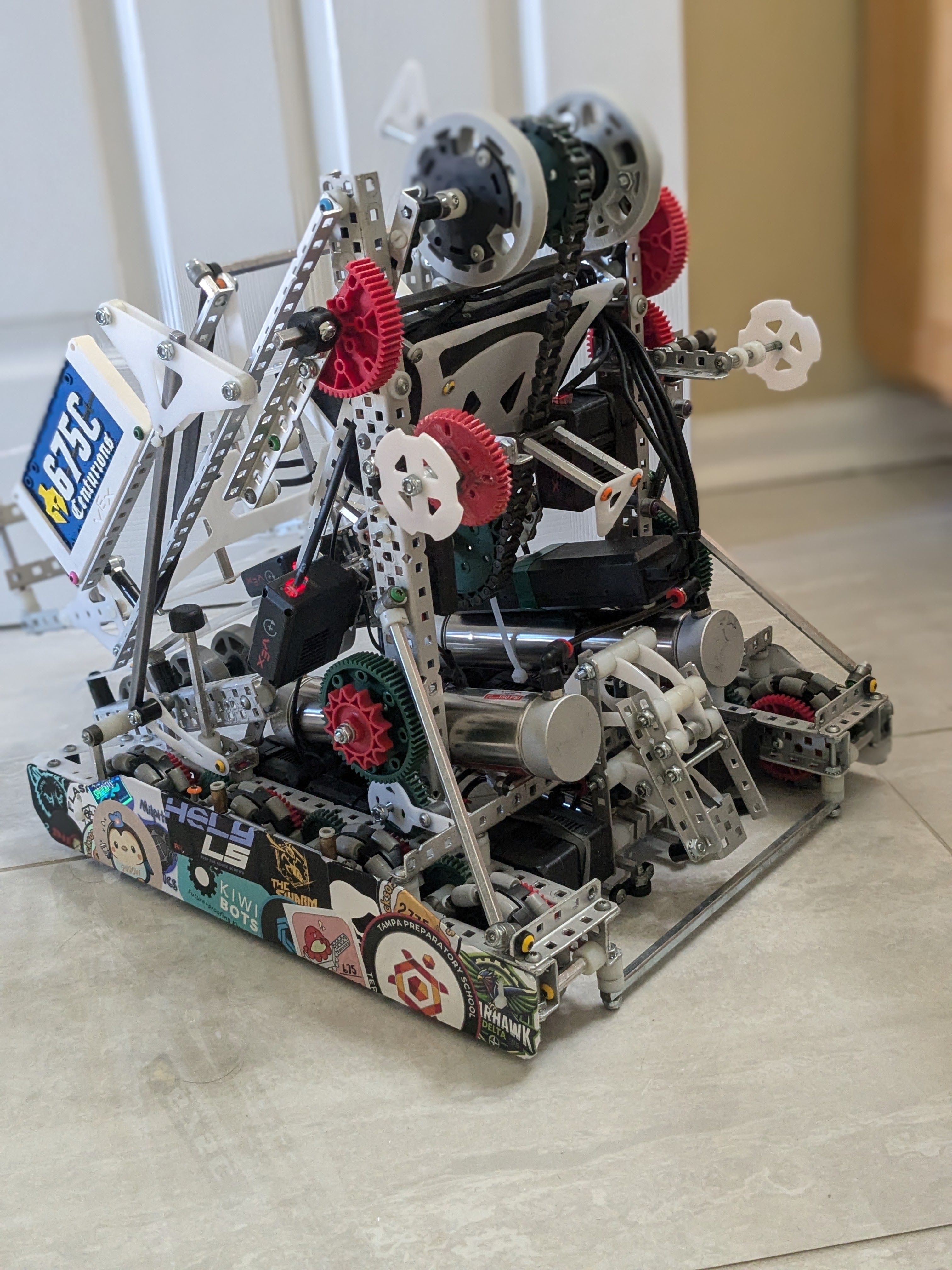
Vanguard
State Championship V5RC Robot

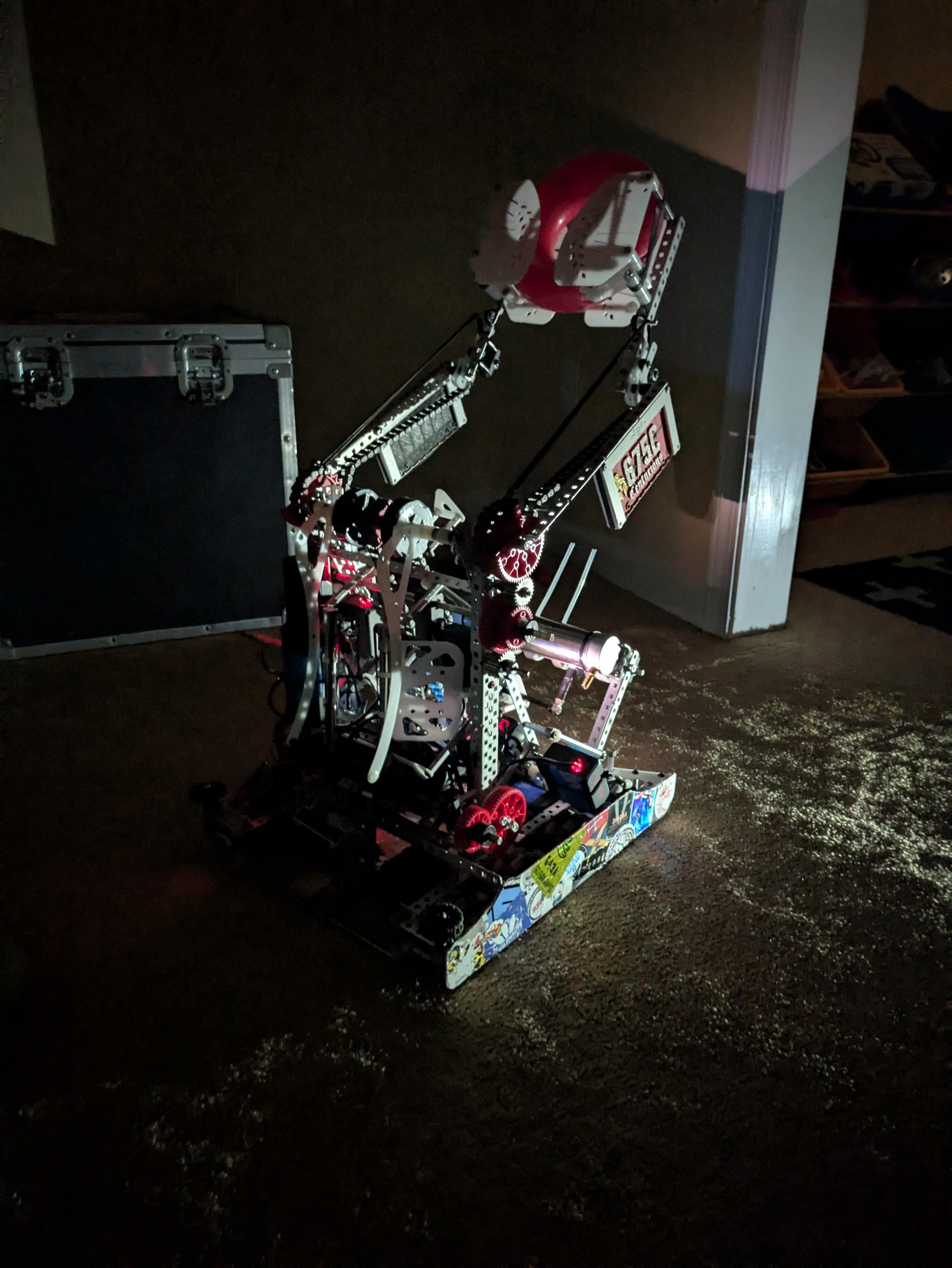
Gladiator
World Championship V5RC Robot